

2020年度に制作したロボット
哨兵ロボット
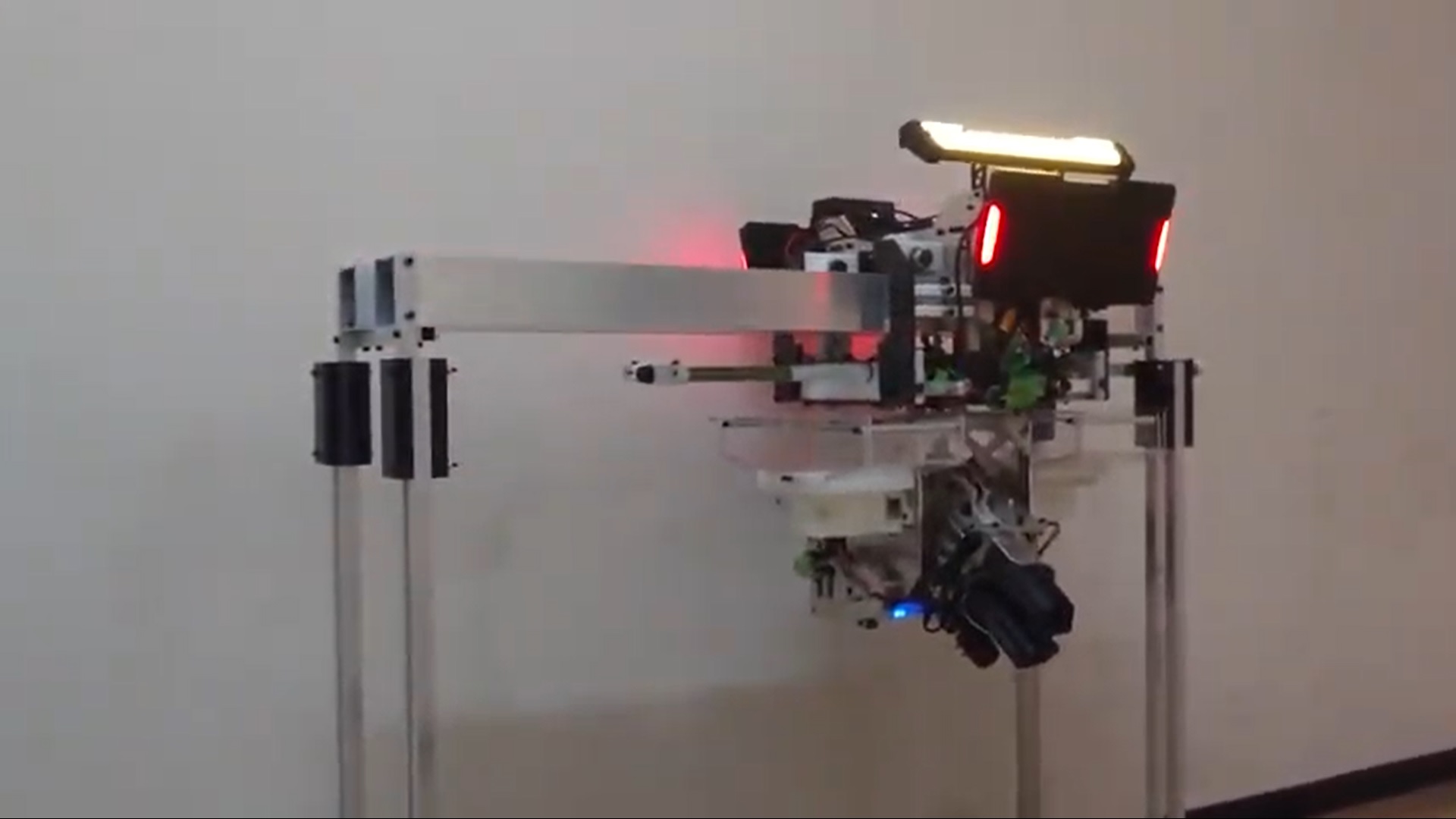
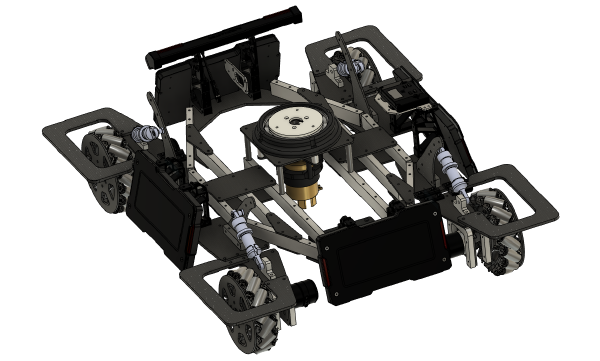
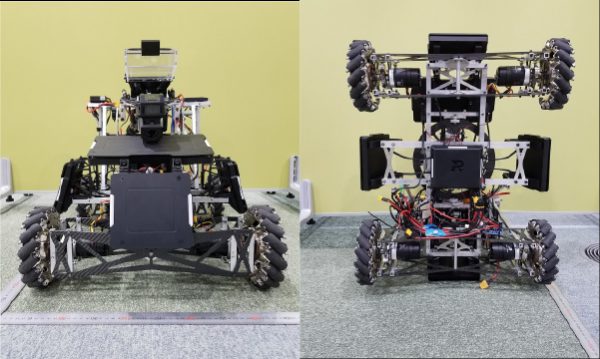
哨兵ロボットは全ロボット中で唯一全自動で動作するロボットです.他のロボットとは異なりこのロボットは自陣の基地ロボット付近にあるレール上をモノレールのように移動し,基地に近づいてきた敵ロボットに攻撃する守りの要です.攻撃も自動で行う必要があるため,カメラ映像から敵ロボットを識別する画像認識の技術が性能に直結します.
足回り
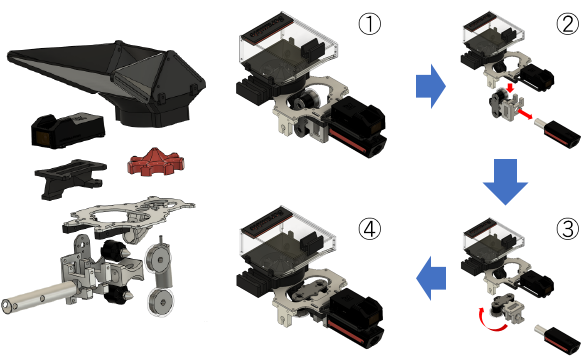
試合前の限られた準備時間で競技フィールド内のレールに素早く取り付けられるよう工夫しました.
普段使っているかばん等にもあるようなバックルを使って固定することで素早い着脱を可能にしました.
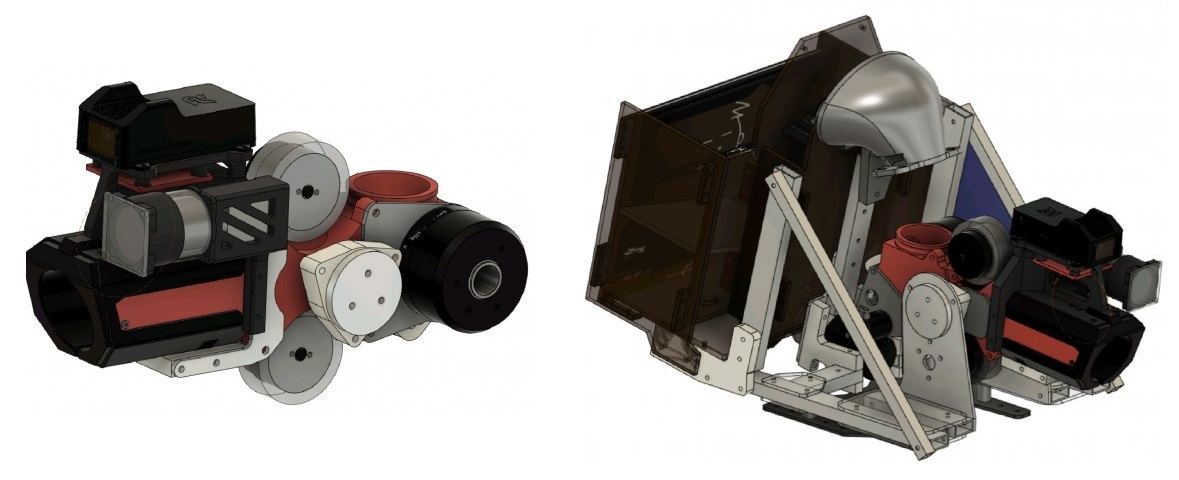
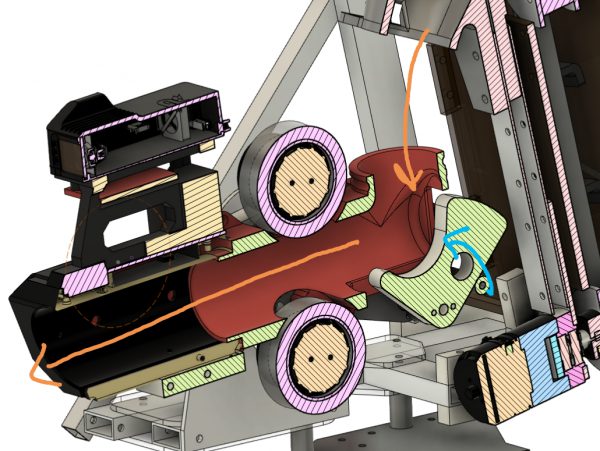
射出機構
射出機構を2つ搭載しているため攻撃力が倍増しています.
射出機構が増えたことでジンバル内部の弾の流路の複雑化したため,試行錯誤を繰り返し改良を重ねました.
画像認識
敵ロボットを自動で攻撃するための機能として『自動照準機能』を搭載しています.この機能を実現するため,哨兵ロボットには高速カメラと小型PCを搭載しています.カメラから取得した画像の中から装甲板の検索して砲塔を向ける角度と球の発射タイミングを計算しています.

エンジニアロボット

エンジニアロボットは他のロボットのサポート役を担当します.他ロボットへの弾の補給を行ったり,体力が0になってしまったロボットを回復スポットまで牽引したりその場で回復させることができます.
42mm弾が入った箱が競技フィールドよりも高所に設置されているため,補給作業中にはロボットの高さが大きく変化します.
攻撃能力がない分,大きな機体で道を塞ぐといったトリッキーな働きや,ダイナミックな変形動作が見どころです.
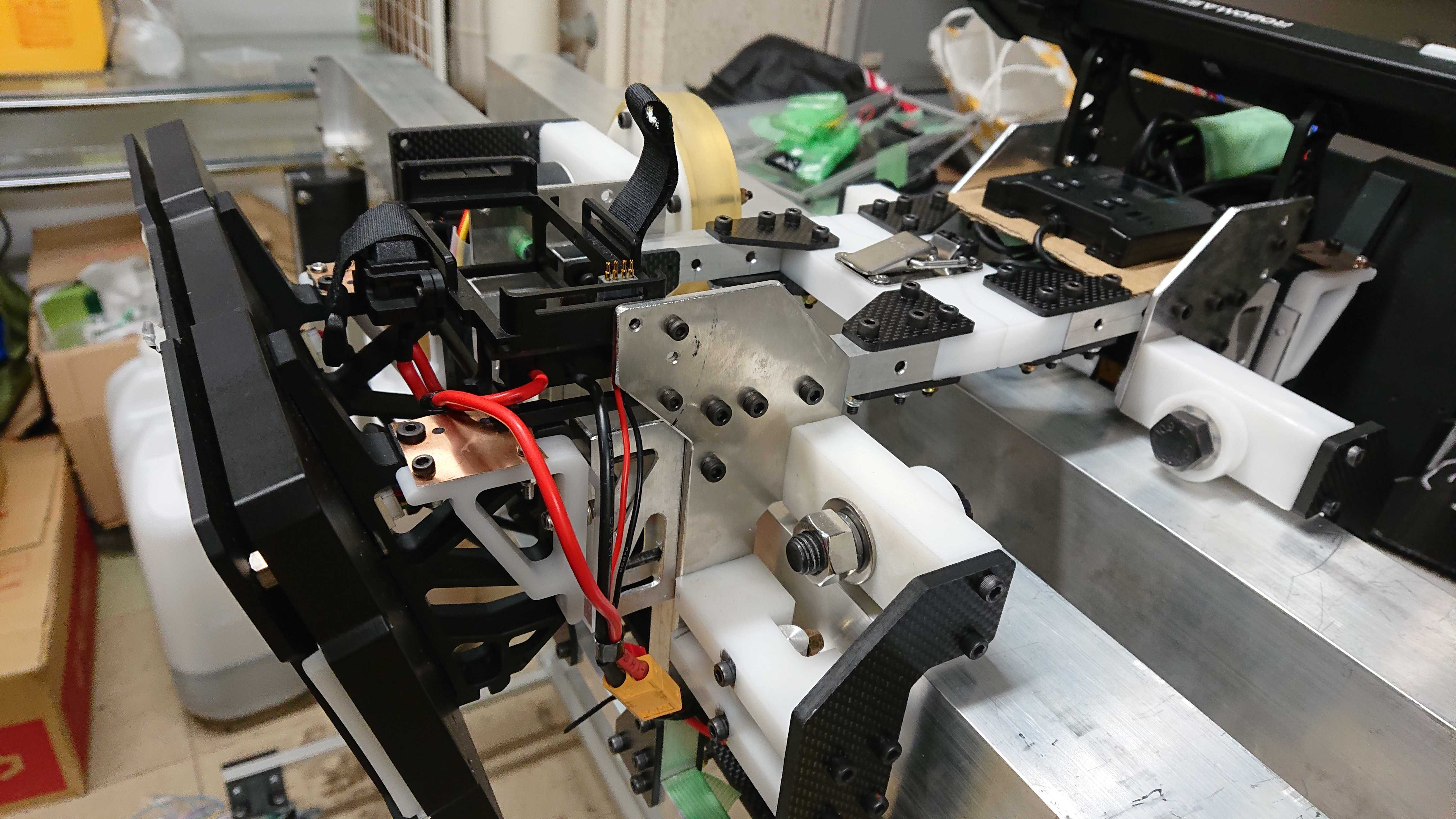
補給機構
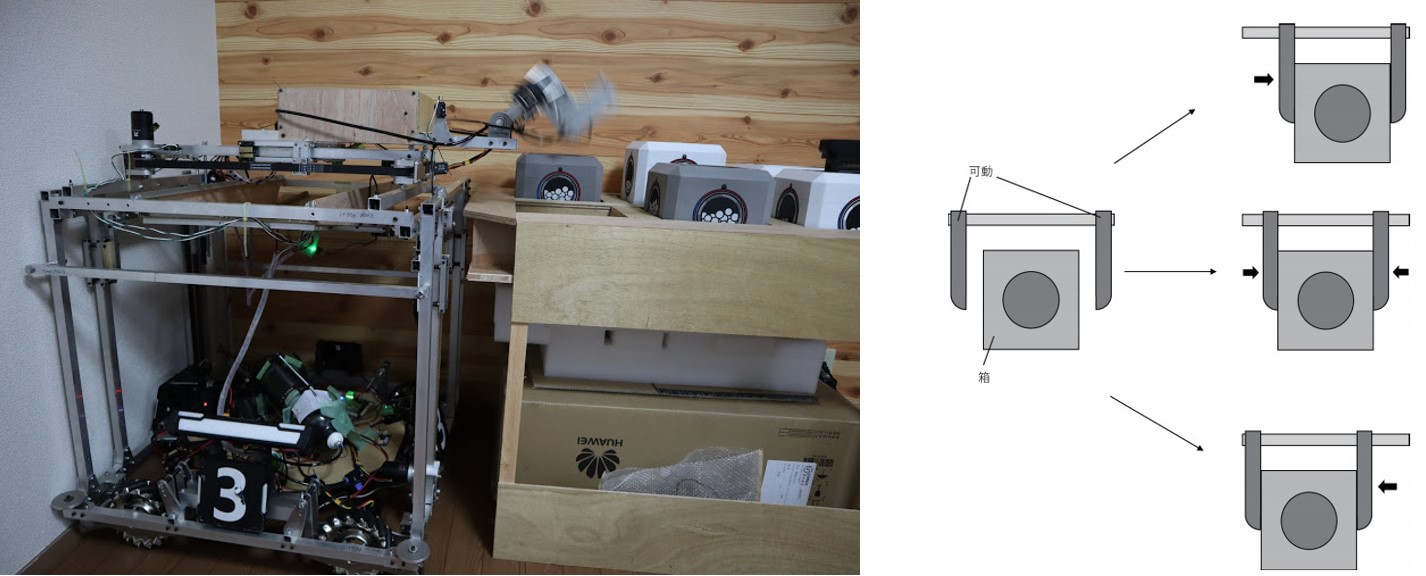
エンジニアロボットの最も重要な役割はヒーローロボットへの42mm弾の補給です.
一連の作業のうち42mm弾が入った箱を取得する作業は敵のエンジニアロボットとの箱の取り合いになることが想定されるため,より早く箱を回収する必要があります.
私たちはそのための工夫として,箱の回数のために大きく展開する機構や,グリッパが箱の位置に合わせて移動するような機構を開発しました.
2019年度に製作したロボット
ウィンターキャンプのロボット
ヒーローロボット

ウィンターキャンプでは,新たにヒーローロボットが追加されました.ヒーローロボットは,攻撃力の高い球(ゴルフボール)を発射できるロボットです.そのダメージ量は歩兵の10倍で,攻撃の際に重要な役割を果たします.しかし,その分相手からの警戒度も高く,集中砲火を浴びる場面も少なくありません...当然激しい接触にさらされることになり,歩兵よりもさらなる消耗が予想されます.また,私達はサマーキャンプでの激戦を経てRoboMasterという競技の難しさの一端に触れました.
サマーキャンプの激戦の様子はこちら(サマーキャンプ2019 決勝戦ラウンド1 FUKUOKA NIWAKA杠さんとの対戦)【https://youtu.be/UuuqZMGlVy0】
足回り
自分たちで見つけた課題点をフィードバックして改良していかなければ,国内外の強豪チーム相手に勝ち抜いていくことはできません.そこで,ヒーローロボットのシャーシは大きく2つのポイントに気をつけて設計することにしました.
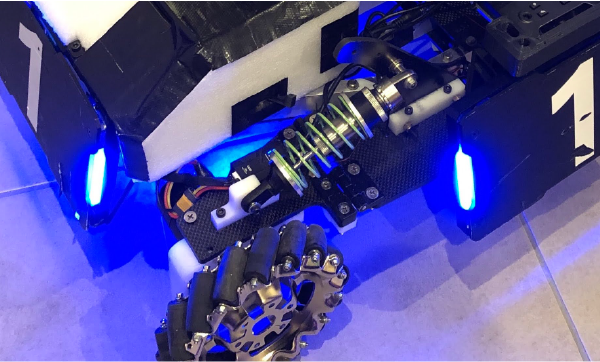
- 走行時の衝撃吸収
RoboMasterの競技に参加してみて想定外だったのが,「思ったよりも段差を降りなければならない」ということでした.乱戦の中で段差から落ちないように気をつけて操縦することは厳しいですし,段差のある最短ルートを走行することは戦況を優位に進めることに繋がります.しかし,20cmぐらいの段差を降りるときに加わる衝撃は,十数kgのロボットにとってはかなり大きなものです.ヒーローロボットには新たに衝撃を吸収する機構をのせる必要がありました.
また,歩兵で採用したリジッドサスペンションは単純な機構で,機体が傾かないような姿勢制御まではできませんでした.歩兵のサスペンションについてはこちらで紹介しています!【https://www.robomaster.jp/team/scramble/report/id/282/】フィールド上に散らばった球を踏んでしまうと視点がぶれてしまい,狙いが定まりません.そのため,新しく4輪全てにバネとダンパーを備えた,本格的なサスペンションを搭載することにしました.車輪に加わった衝撃をバネとダンパーが吸収し,本体へのダメージを軽減してくれます.また,新しいサスペンションは4輪がすべて独立して動くため,たとえ球を踏んでもその車輪のみが持ち上がり,本体の姿勢変化は小さくなります.バネやオイルの選定に苦労しましたが,効果を発揮しました. - フレーム自体の頑丈さ
いくらサスペンションがあるとはいえ,吸収できる衝撃の大きさと種類には限りがあります.歩兵ロボットでは軽量化と強度を両立するためにカーボンの板材を使用していましたが,度重なる衝突でフレームの細い部分等が折れてしまっていました.そこで,ヒーローロボットではより頑丈なフレームを目指し,アルミパイプをカーボンの板材で挟んで接合する構造を採用しました.練習も含め,組み立ててからこれまでかなりの時間動かしてきましたが,フレーム部分は一度も壊れていません.厚みを抑えつつ頑丈な構造になったのではないかなと思います.
射出機構
ヒーローは歩兵の10倍の攻撃力を持つゴルフボールを唯一発射できるロボットです.しかし,このゴルフボールで好きなだけ攻撃できるわけではありません.ウィンターキャンプでは1ラウンド30発のみしか発射できませんし,中国で行われる国際大会ではフィールド上から回収してこないと撃つことすらできません.(参考: https://youtu.be/HHXEeiZc5pw?t=7663 )
歩兵の17mm球が1ラウンド最大300~400発補給できることを考えると,攻撃力が高い分かなり貴重で一発も無駄にできません.歩兵の射出機構は短い時間で多くの球を当てるために連射力が大事でしたが,ヒーローでは撃ちたいときにタイムラグなく撃ち,確実に1球を当てる精度が必要です.そのため,ヒーローの射出機構では撃鉄によって確実に1球を送り出す機構を採用しました.また,射出用のモータも歩兵よりも強力で,回転数をフィードバックできるものを使っています.
ウィンターキャンプでは基地に無駄なくダメージを与え,多くのロボットを撃破することができました.(WCの試合動画はこちら: https://www.youtube.com/watch?v=CQDMlOumJKg)
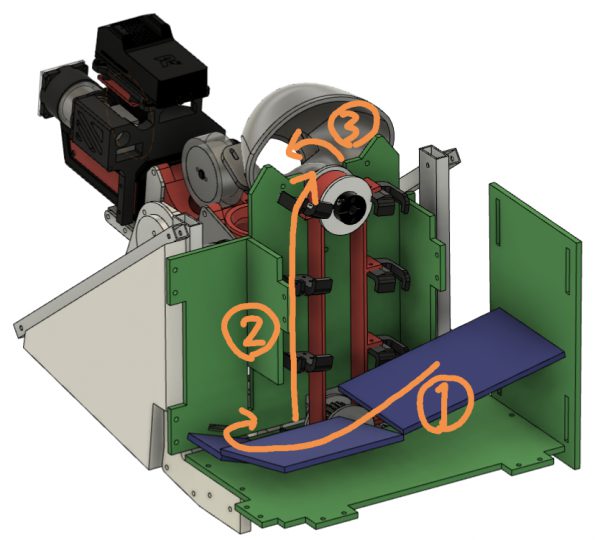
また,ゴルフボールは1球あたりの重さが17mm球の約15倍で,満載すると1.2kgにもなります.機構的には歩兵と同様にロボットの上側に球を貯めて,そこから装填するのが楽ですが,重心が上に寄って不安定になってしまいます.そこで,弾倉を射出機構より下に配置し,ベルトを使って持ち上げ,射出機構に落とす方法を採用しました.
また,競技用のゴルフボールはゴム素材でできており,摩擦が大きいのですぐ詰まってしまいます.うまくゴルフボールが流れるように仕切りの板の形や角度を何度も変更しました.実はこの詰まりの解消の方が射出機構の調整よりも時間がかかっています.装填機構は目立ちませんが,安定した発射機構を支えるための重要な役割を果たす,奥が深い機構なのです.
サマーキャンプのロボット
歩兵ロボット

この歩兵ロボット達は,RoboMaster班が初めて作った機体です.当時のメンバーは高専ロボコン経験者が大半で,RoboMasterのようなロボット同士が激しくぶつかり合う競技に出場するのは初めてでした.
そこで私達は,『手堅く動くロボットで出場し,RoboMasterの競技特性を掴む』ことを方針にロボットを製作として掲げることにしました.タフなロボットを作り上げるための経験や知見を積み上げるためには,実際に大会で自分たちが作ったロボットを動かすのが一番です.多くの新規チームが委員会から提供されたサンプル機を使用する中,Scrambleは新規チームの中で唯一ロボットを2台とも自作してサマーキャンプに挑みました.
足回り
まずはシャーシ(足回り)についての解説です!メインフレームには軽量で強度のあるCFRP(カーボン繊維強化プラスチック)を多く使用しました.RoboMasterではルールによって移動に使える電力が制限されており,機体の軽量化は機動力アップに繋がります.また,足回りには高い走破性も要求されます.フィールド上には坂や段差が多く存在しており,足回りには高い走破性が要求されます.そこで, サマーキャンプでは前2輪がフレームごと左右にスイングするリジットサスペンションを採用しました.単純な仕組みですが,このサスペンションがあることで常にどこかのホイールが接地し,スタックしてしまう危険を大幅に減らすことができます.

射出機構
射出機構は,2つの高速回転するゴムローラで球を挟み,ピッチングマシーンのように飛ばしています.ゴムローラーは自作していましたが精度が悪く,回転中はずっと掃除機みたいな音がしていました.サマーキャンプに出場した中で,間違いなく一番うるさいロボットだったと思います・・・
RoboMasterにおいて,射出精度は試合の勝敗を左右する重要な要素の一つです.撃つ球は直径17mmとビー玉程度の大きさしかなく,射出機構の細かな違いが大きく精度に影響します(etc. ローラーの向き,ローラー間の距離,ローラーの柔らかさ,球のちょっとした当たりの違い・・・).様々な条件を試し,どの要素が射出精度の向上に必要なのかを見極めるために,球のガイドパーツ,ローラーのモータを取り付ける板等を簡単に付け替えられるように設計しました.
更に,ローラーの向きも組み換えによって変更できるようになっています.こういった対照実験がしやすいような工夫を取り入れて製作した結果,短期間で多くのデータを取ることができました.

制御回路
RoboMasterにおいて、回路はマシンを動作させる心臓部ともいえる要素です。そのためRoboMaster運営からは開発ボードが支給されます。しかし私達はSTMicroelectronicsから販売されているSTM32F446RET6マイコンを使用した自作マイコンボードを使うことにしました。RoboMasterはルールが変更されることが多い競技であるため多少融通が利き、私達が使い慣れている物がいいだろうということでこの選択肢を選びました。
また、歩兵ロボットの回路構成ですが、RoboMasterの電気系統には試合の審判を行うための機器(ジャッジシステムとよばれている物)が入っており、複雑になっています。そのためCAN通信を使用することで、できるだけ配線数を減らしてDJIの既製品の配線のみを使用するように心がけました。サマーキャンプ2019の際は初挑戦であったこともあり、三端子レギュレータの故障や激しいぶつかり合いによってコンデンサが外れるなどの故障がありましたが、無事にサマーキャンプに挑み最後まで戦い抜くことができました。


制御
ロボットを制御する上で最も大変だったのは,視点を安定させることでした.ロボマスのロボットはカメラを載せてその画面を見ながら操縦するため制御が不十分だとカメラが揺れて操縦が難しくなるためです.制御担当者は高専ロボコンでロボットの制御をしていましたが,高専ロボコンではロボットを直接見ながら操縦することができます.そのため,練習が始まってからほんの少しの揺れが操縦性に影響を及ぼすことに気が付き,調整を詰めなおす必要が出てくるなどスケジュール通りに進まないこともありました.
また,シャーシを左右に振って敵の弾が当たりにくくする処理も実装していましたが,上記の操縦性の面で調整が間に合わず大会ではあまり使用することができませんでした.これはジャイロセンサの搭載位置が高専ロボコンでの経験からシャーシ側であったことが原因の一つです.ロボマスではシャーシの安定性よりも機構側である射出部の安定性のためにジンバル側にジャイロを載せたほうがいいなど新たな知見が得られました.機械同様に制御面でもRoboMasterの競技特性を掴む必要があると感じました.
そのほかには,ジャッジシステムに関する情報が少ない中, ジャッジシステムからデータを取得し射出熱量を制限する制御を行いました.これを実装する前は操縦者が熱量も気にしなければならず,少し気を抜くとダメージを受けるなどかなり操縦者の負担になっていましたが, その対策をすることができました.

ぽちとたま
Scrambleのロボットには全て名前がついています.2台の歩兵ロボットの名前はそれぞれ「ぽち」,「たま」です.以前TVの番組でScrambleを取材して頂いた際に,リポーターの方から「ロボットに名前はあるんですか?」と聞かれ,それに対して当時のキャプテンがその場で適当に命名したのが始まりです.取材の際の放送はこちらから見ることができます.【https://youtu.be/F2F1B5z-VEM】
それぞれのロボットには名前のシールが貼られていて, 装甲板シールを貼っていないときに遠くから見てもどちらの歩兵なのかすぐに分かります.このシールの文字はメンバーがホワイトボードに書いたものなのですが, 丸みのある文字は「親近感を抱く」と言われているのでより歩兵に親近感を抱いてもらえると嬉しいです.
また, 整備が必要な際には「ぽちの○○の調子が悪い」というような言い方をすることで, どのロボットに問題が起こっているのかを間違いなくメンバー間で共有することができていました.さらに, 名前をつけると自然と愛着が湧いてくるもので,たとえロボットの調子が悪いときでも「ぽちもたまも気まぐれだからしょうがないな」と穏やかな気持ちを保てるのでおすすめです.

